Copter based motion-time stacks
Some of the new interesting perspectives of copter based regatta and yacht photography clearly come with time series visuals – or as I would rather call it: “motion-time stacks”. Its not new in sports photography and with fast cont. autofocus and high speed cont. shooting speed we have seen it in motorbike sports, skiing , swimming and especially with athletics and dancing. The appealing aspect is that you can tell a (very short) story with these stacks. The image reveals a series of decisions and is much more than a capture of a specific situation.

With UAV visuals you can create comparable shots – mainly possible due to the precise GPS controlled position hold of the modern quadrocopters – especially the DJI Phantom series. The lat/lon/altitude position is very precisely corrected and together with the gimbal correction you have only minimal changes of the area covered with the FOV of your camera. Combining different situations at the same position is more a question of how to post process the time series and how to combine the changes into one image. With the new Phantom copter generations you can easily leave the copter at a specific place & altitude and let it capture the scene while shooting with a DSLR at the water level. The only problem are winds above 5Bf and/or gusts that exceed 5-6 Bf. The copter drifts away and you would have to manually move the copter in S-Mode to get back to your start position. Flying freely without VR-googles is also not too much advised when you do not have constant visual control of the copter position. You easily loose track where the copter exactly is. The standard RTH function does not work on water (you usually drift on a small rib, when you trigger RTH the copter will fly towards the position where you have been – not to where you are now) – though flying back to sender (and not to the start position) is helpful and implemented in a way as you can update the “Home Point” manually in the Phantom series control software when you have a GPS enabled controller device (iphone/iPad). This can safe your copter because on water you easily loose track where exactly your copter is. RTH with the hover option enabled (you do not want the copter to land automatically!) is a great function as long as you update the home point regularly on the boat. Thats the function that I trained a couple of times for these not so nice moments when you believe that you lost control and the battery warning noise is slowly eating your coolness. Btw: updating the controller position should be set with a shortcut once selected – its the function that you want to trigger every 20sec or so on a boat. I dont understand why this is not already implemented in the DJI GO app.
The „Dynamic Home Point„ feature of the Inspire copter controller software (version update 29.05.17) is also a very remarkable feature in that context. It updates the position of the „Home Point“ using the controller GPS information. The RTH function is in that form a really useful function again. This is by far the most secure option for flights over water where you start from a boat but it doesnt create safe automatic landings on a moving boat! Landing is usually by picking the copter in air by hand. Its the reason why the Phantom series works well here: you can easily pick the copter up by its legs.
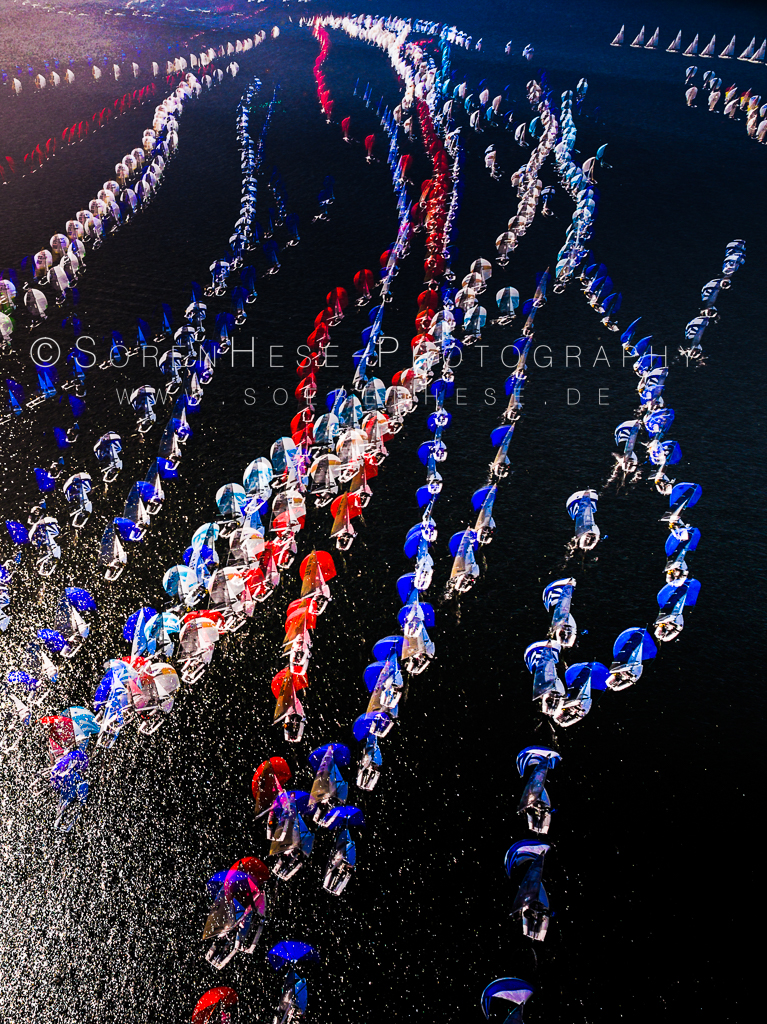
Some picture examples that I did in may/june 2017 to find out what is working are attached here. Imo you either fly very high (you need a permission for above 100m!) or very low – approx. 20m – to get exciting perspectives – the in between wont make it in my opinion. Low flying is difficult, you often cannot clearly define the relative height difference to the boat rigs and you do not want to distract peoples attention. Very high positions are nice to capture the field at the start leg or at the luv position but even with the 20mm (equiv) of the P3 you will need 150-250m flight altitude – and clearly a BFA permission to go that high.
To create appealing visual compositions you have to pre-visualize the direction and possible crossings of the boats – that is really the most challenging part. I usually try to get a fixed position close to a turning point where maneuvers take place. There are endless option how to combine light and action into something appealing. With the wide angle 20mm equiv. camera system of the P3 one always collects sun glint that will mess up the stacking process later. Its hard to avoid but you can try to keep at least the action out of the glint region and it can be also nicely used as part of the composition.
With the new copter regulation in place for Germany its easier to do commercial/research work than it was before. Mainly because you do not need an allowance for every flight from the regional authority anymore. There is a general clearance for commercial flights below 100m, and below 5kg weight in place. Above 100m and in EDR zones and some other restricted region-types a special permission is needed (an insurance is also a given).
In Berlin the EDR4 is blocking the south-western part of the Havel – so everything west of the “Kälberwerder” island is very clearly within the EDR4 zone (a restricted flight zone around the HMI experimental nuclear reactor). For this year for the “Havel Klassik” regatta race I applied for a clearance (that I received already) because the interesting visuals are all west of the Peacock Island and fully within the EDR4 zone.




I will add some more shots here in the future to make this post a diary of the experiences with the P3A and the P4P from DJI. So stay tuned.
Sören